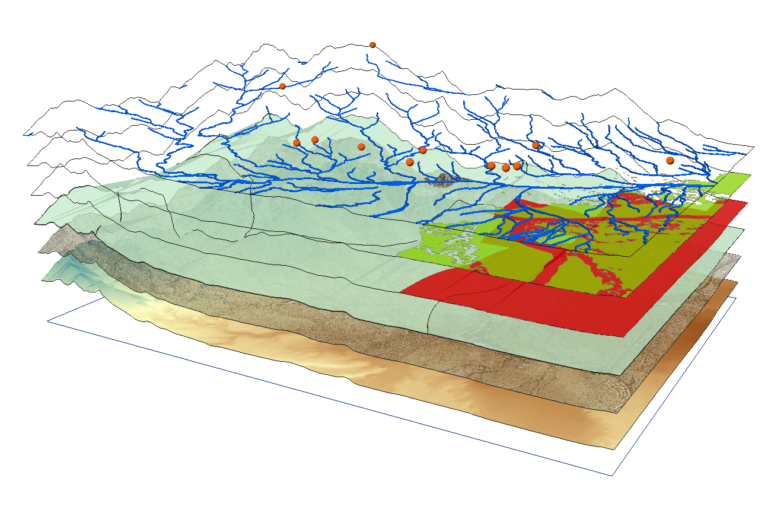
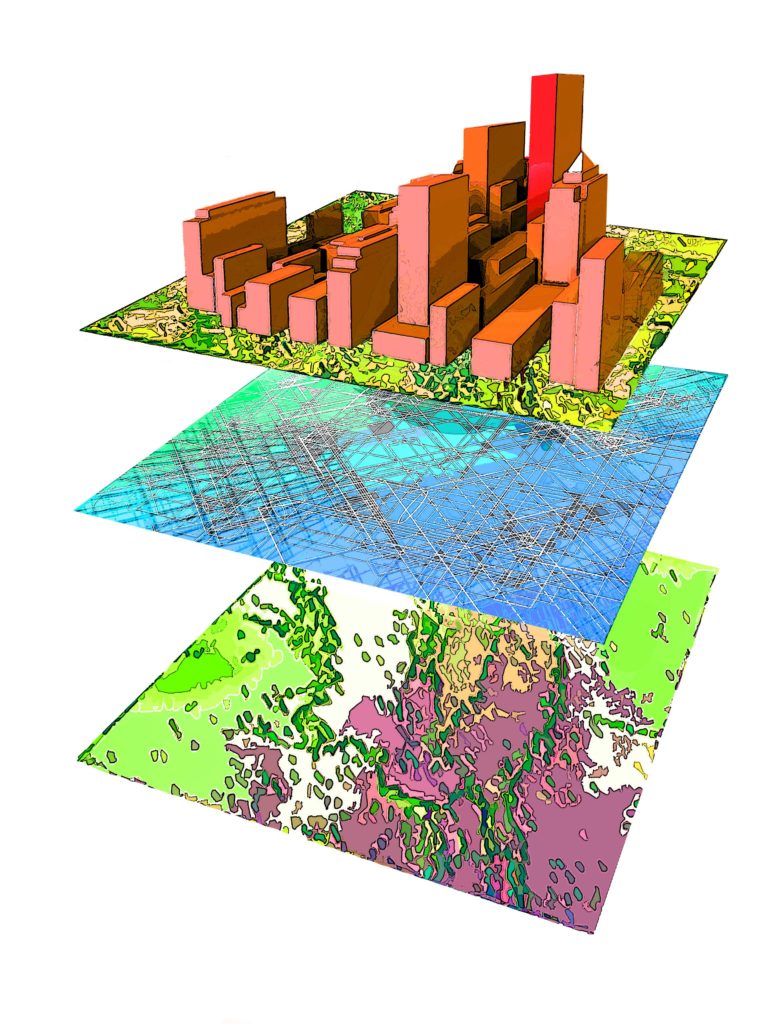
Систем за креирање и управљање просторним подацима са припадајућим атрибутима.
Способан за интеграцију, складиштење, измјену, анализу и приказ информација везаних за просторну локацију.
„Паметна карта“ – креирање интерактивних упита, анализа просторних информација и спровођење промјена.
Области примјене ГИС-а
Географски информациони системи имају широку примјену у бројним областима. Могу се користити у научним истраживањима, управљању природним и ресурсима, планирању развоја и просторном планирању. ГИС је користан у маркетиншким истраживањима, геологији, грађевинарству, као и свим другим областима које користе просторне податке.
Неке од области примјене ГИС-а:
Телекомуникације
Навигација
Хитне услуге
Комуналне службе
Трговина и економија
Шумарство
Епидемиологија и здравство
Просторно планирање
Образовање
Области рада са ГИС-ом
Владине агенције (локалне, регионалне, државне)
Геодетска истраживања, инжењеринг, изградња
Животна средина и управљање природним ресурсима (агенције за животну средину)
Пољопривреда, шумарство, водопривреда
Саобраћај
Безбједност
Рударство
Медицина (здравље)
Археологија
IT компаније (гис техничар, аналитичар, програмер, менаџер)